Školní experimentální systém ISES
Internetové Školní Experimentální Studio

| Úvod | Aktuality | Vyhledávání | Fotogalerie | Technické informace |
| Moduly | Software | Experimenty | Nové soupravy | Odkazy, články |
| Download | Technická podpora | Kontakt | Vzdálené laboratoře | Administrace |
Sonar
 Modul ultrazvukový detektor polohy - sonar je modul, který umožnuje snímání
polohy bezkontaktním způsobem, tj. bez bez vlivu snímací aparatury. Kontakt mezi
pohybujícím se tělesem (s ultrazvukovým detektorem) je zprostředkován pouze
ultrazvukovým signálem a infračerveným signálem (nikoliv např. elektrickými vodiči
nebo vláknem a podobně).
Modul ultrazvukový detektor polohy - sonar je modul, který umožnuje snímání
polohy bezkontaktním způsobem, tj. bez bez vlivu snímací aparatury. Kontakt mezi
pohybujícím se tělesem (s ultrazvukovým detektorem) je zprostředkován pouze
ultrazvukovým signálem a infračerveným signálem (nikoliv např. elektrickými vodiči
nebo vláknem a podobně).
Parametry a princip činnosti :
Modul sonar tvoří přijímač RX a vysílač TX. Detekuje polohu v rozmezí 0 - 2 m s
přesností cca 1 cm. Linearita je je rovněž cca 1 cm v celém oboru. Pouze pro 0-20 cm
může být neliarita větší, neboť v tomto malém rozsahu je časové zpoždění
ultrazvukového signálu velmi malé. Sonar se zapojuje k soupravě ISES jako všechny
ostatní moduly - do některého ze vstupů soupravy A až D. Souprava ISES modul
automaticky detekuje. Přijímač a vysílač jsou umístěny proti sobě, pokud možno v
přímém směru. Princip činnosti je založen na šíření zvuku (v našem případě
ultrazvuku) ve vzduchu.
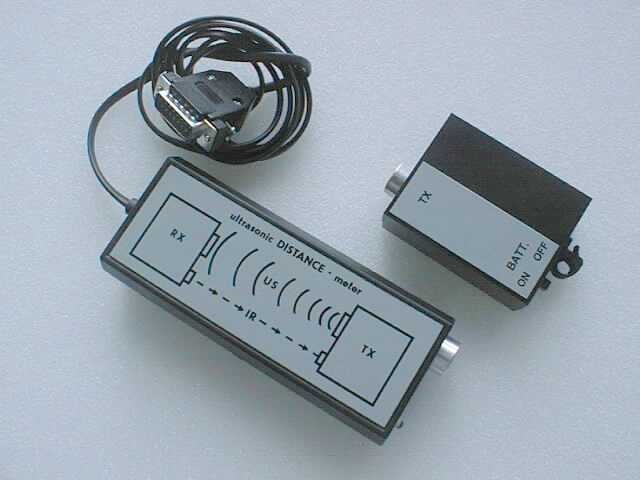
Na štítku modulu sonar je zobrazena funkce sonaru. Přijímací část ozn. RX sonaru je
zapojena do panelu ISES, vysílací část ozn. TX je nasměrována proti přijímači.
Interakce mezi přijímačem a vysílačem je jednak po ultrazvukovém signálu ozn. US
(frekvence US signálu je 40 kHz), jednak po infračerveném signálu ozn. IR .
Přijímací část sonaru RX vyšle startovací IR signál, který se šíří rychlostí
elmg. signálu (světla) a který okamžitě beze zpoždění odstartuje vyslání US
signálu z vysílací části sonaru TX, který se šíří rychlostí zvuku ve vzduchu.
Ten s měřitelným časovým zpožděním dorazí do přijímací části RX. Toto
časové zpoždění je úměrné vzdálenosti přijímače a vysílače ultrazvukového
signálu. Časové zpoždění je převedeno na analogový napěťový signál, který se
měří na panelu ISES. Abychom mohli měřit polohu kontinuálně, je třeba celou výše
popsanou činnost periodicky opakovat (opakovací frekvence vysílání IR a US signálu
je cca 100 Hz) .
Vysílací část TX je napájena 9V baterií. Výměna se provede jednoduše po
rozšroubování jediného šroubku na horní ploše. Před vlastním měřením je nutné
zapnout vysílač TX vypínačem ON-OFF.
Upozornění:
Přijímací část tvoří jakýsi ultrazvukový mikrofon. Tato část
ovšem nesnímá pouze US signál, ale částečně i normální akustický signál. Při
používání se snažíme omezit vliv parazitních zvuků. Např. při použití na
vzduchové dráze nepřipevňujeme přijímací část RX na konstrukci vzduchové dráhy
aj.
Použití:
Modul sonar uplatníme všude, kde je třeba bezkontaktní měření polohy. Všem se jistě vybaví
bezkontaktní snímání polohy vozíčku na vzduchové dráze. Ale i jednodušší experimenty prověří
vlastnosti rovnoměrného a nerovnoměrného pohybu.
Experiment 1:
Zkuste zopakovat pohyb, který je zadán grafem závislosti dráhy na čase. Viz. následující obrázek.

Experiment 2:
Je možné bezkontaktní snímání kmitů na pružině. Vysílač připevníme na těleso na pružině.
Doporučujeme pružinu s malou tuhostí a větší těleso, aby amplituda kmitů byla dostatečně veliká.
Experiment 3:
Odvážní, ale precizní demonstrátoři si mohou zkusit volný pád vysílací části modulu sonar.
Vysílací část TX připevníme na gumičku, která ztlumí volný pád vysílače TX. Experiment sestavíme
tak, že necháme padat část TX, která je jištěna na gumičce dlouhé asi 1m. Přijímač RX je umístěn
pod vysílačem, např. na zemi. Nastavíme správné parametry v programu ISES, celový. čas asi 0.5
až 1 sekundu, vzorkovací frekvence asi 1000 Hz. Odstartujeme např. ručně měření a pustíme krabičku
TX. Ta padá volným pádem. Cca po 1m volného pádu gumička ztlumí pád. Nedoporučujeme pevnou nit,
ale gumičku. Pozor i po protažení gumičky je třeba zajistit, aby se přijímač a vysílač nesrazily.
Experiment 4:
Ultrazvukový detektor polohy - sonar je možno využít i jako závoru, se širokou přerušovací dráhou
např. pro přeběh závodníka, průjezd auta aj. Na změřeném experimentu lze provést odečet počtu
přerušení dráhy tj. např. počet průjezdů aut, počet účastníků aj. Samozřejmě, že lze dopočítat i
rychlost těchto velkých těles.